


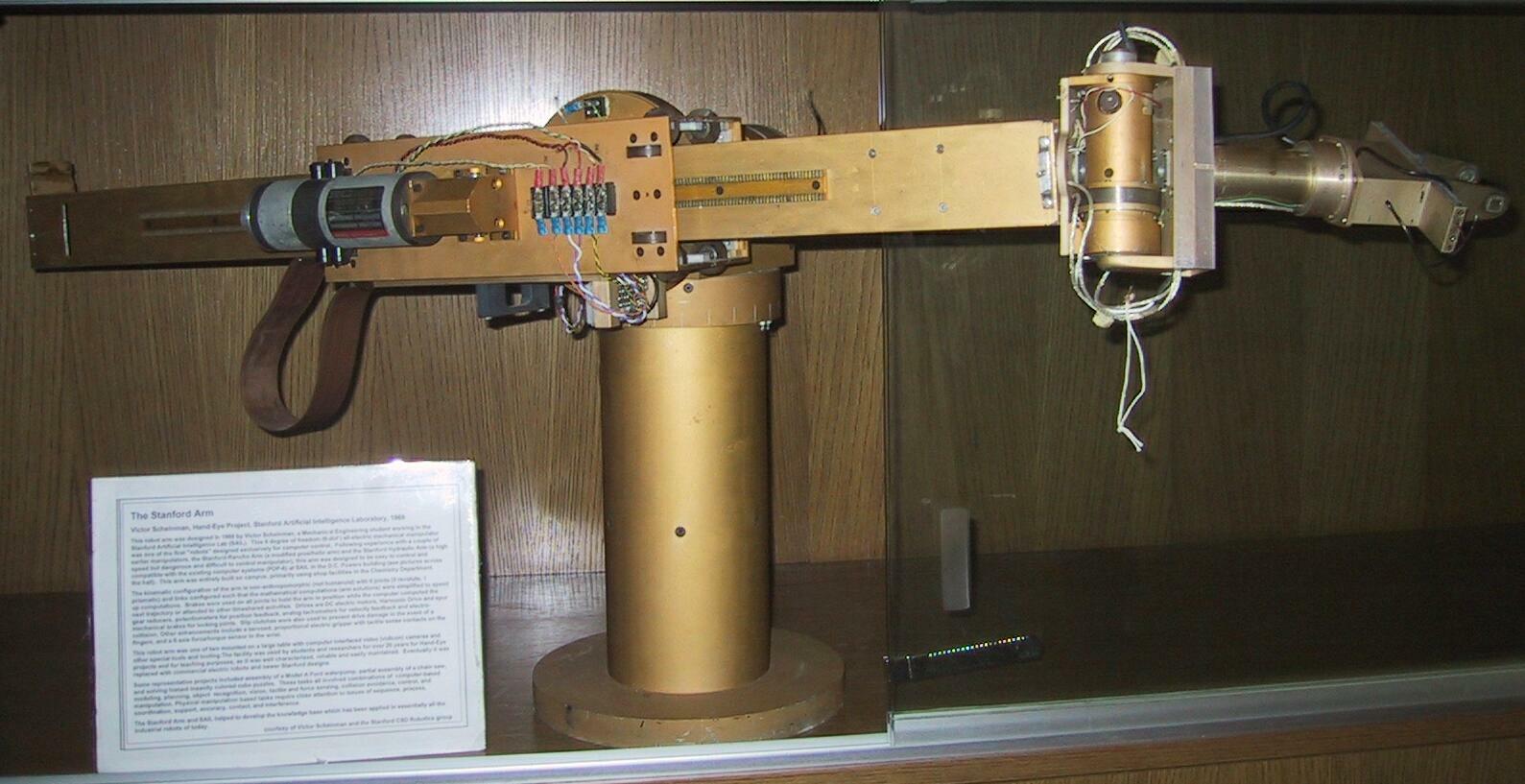
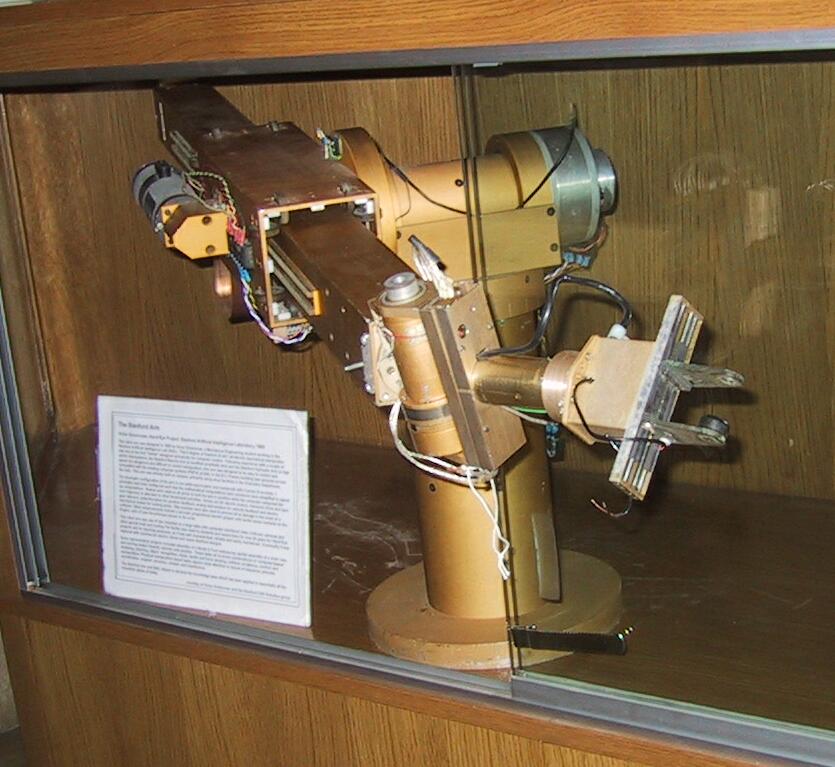

Stanford arm outlet
Stanford arm outlet, Zero position for the Stanford Manipulator. Download Scientific outlet
$0 today, followed by 3 monthly payments of $15.00, interest free. Read More
Stanford arm outlet
Zero position for the Stanford Manipulator. Download Scientific
3042b Factory Direct Industrial Robot 3 Axis Arm Robot Arm Kit for
Stanford arm Wikipedia
Robot
Robot
Robot
pallimunai.com
Product Name: Stanford arm outletStanford arm Wikipedia outlet, Robot outlet, Robot outlet, Robot outlet, Stanford robot arm design Download Scientific Diagram outlet, Robot outlet, Autodromo Stanford Arm outlet, Stanford s robotics legacy Stanford News outlet, Timeline of AI Achievements outlet, Victor Scheinman Assembly Line Robot Inventor Dies at 73 The outlet, Stanford Hydraulic Arm CHM Revolution outlet, Computer History Exhibits Photographs 2005 outlet, Rise of the robots The evolution of Ford s assembly line outlet, Guys please help me with this stanford arm calculation thank you outlet, a 6DOF articulate arm. b 6DOF Stanford arm. Download outlet, Solved Consider the 6 link Stanford Arm. In this homework Chegg outlet, Stanford Arm Multibody Multi Domain Physical Model in MapleSim outlet, IK Example RRP Stanford Manipulator outlet, Figure 2 from An identification method for estimating the inertia outlet, 1 Stanford Manipulator First Three Joints outlet, File Stanford Hydraulic Arm.jpg Wikimedia Commons outlet, Analytical Forward and Inverse Kinematics for Stanford Arm outlet, Solved 2.12 A Stanford robot arm has moved to the position Chegg outlet, eNotes Mechanical Engineering outlet, International Journal of Engineering Advanced Technology IJEAT outlet, Simulation of stanford type robotic manipulator outlet, Stanford Hydraulic Arm 102689927 Computer History Museum outlet, 2.8.2 DH Representation example Stanford Arm Science Kinematics outlet, Solved B3. Given the Stanford arm as following figure where outlet, ROBOTICS Homework 2 Given the Stanford arm as following figure outlet, Given the Stanford arm as follows where d2 0.1 1 Chegg outlet, 3042b Industrial Robot Mechanical Hand Dobot Small Collaborative outlet, Solved 2.12 A Stanford robot arm has moved to the position Chegg outlet, Zero position for the Stanford Manipulator. Download Scientific outlet, 3042b Factory Direct Industrial Robot 3 Axis Arm Robot Arm Kit for outlet.
-
Next Day Delivery by DPD
Find out more
Order by 9pm (excludes Public holidays)
$11.99
-
Express Delivery - 48 Hours
Find out more
Order by 9pm (excludes Public holidays)
$9.99
-
Standard Delivery $6.99 Find out more
Delivered within 3 - 7 days (excludes Public holidays).
-
Store Delivery $6.99 Find out more
Delivered to your chosen store within 3-7 days
Spend over $400 (excluding delivery charge) to get a $20 voucher to spend in-store -
International Delivery Find out more
International Delivery is available for this product. The cost and delivery time depend on the country.
You can now return your online order in a few easy steps. Select your preferred tracked returns service. We have print at home, paperless and collection options available.
You have 28 days to return your order from the date it’s delivered. Exclusions apply.
View our full Returns and Exchanges information.
Our extended Christmas returns policy runs from 28th October until 5th January 2025, all items purchased online during this time can be returned for a full refund.
Find similar items here:
Stanford arm outlet
- stanford arm
- boston dynamics military
- xiaomi roborock xiaowa
- xiaomi 1s vacuum
- pepper ai
- spot mini robot
- mijia roborock
- roborock c10
- roborock amazon
- universal robot ur10